变形人
变形人项目演示了如何使用IK、路径和权重来创建可伸缩的四肢,使用简单的控制来简化动画过程。下文我们将详述变形人的后退,前腿的设置方式相同。
约束
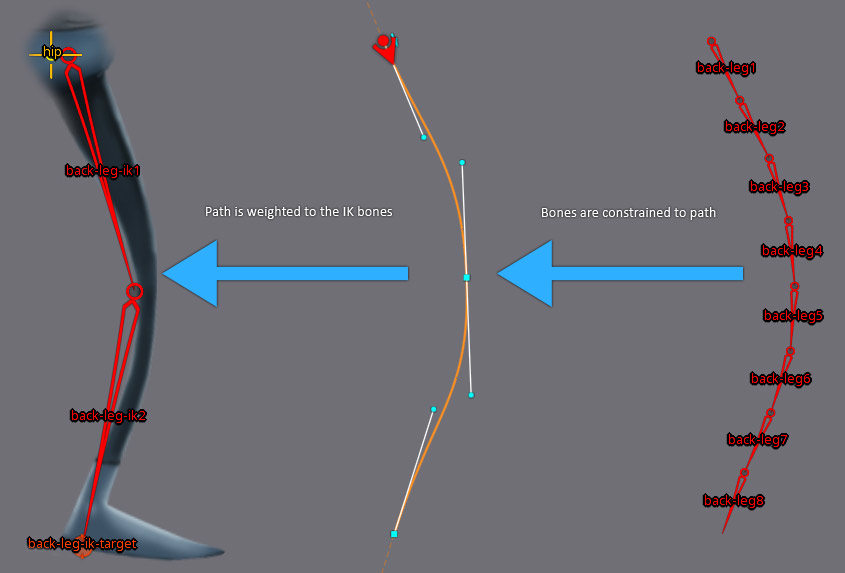
后腿由两个骨骼组成,分别是back-leg-ik1和back-leg-ik2,都附加到hip骨骼上,它们被back-leg-ik两骨骼IK约束驱动。back-leg-ik-target骨骼为IK约束的目标: 移动此骨骼将使back-leg-ik1和back-leg-ik2骨骼跟随,从而可简单控制腿移动。
我们还在back-leg-ikIK约束上启用了伸展属性。不管IK骨骼的原始长度如何,使其能够伸展两个IK骨骼,并始终能够达到IK目标。
hip包含一个名为back-leg-path的插槽,其中包含一个名为back-leg-path的路径附件。这条路径的顶点被加权到back-leg-ik1和back-leg-ik2骨骼。当这两个骨骼被back-leg-ikIK约束移动时,路径会相应变形。
还有八个名为back-leg1到back-leg8的骨骼链被附加到hip骨骼。这8个骨骼的长度和位置由back-leg-path路径约束控制。路径约束的间距类型设置为百分比,其值设置为100 / 8 = 12.5。这就保证了骨骼总是填满整个路径,该路径上的8个骨骼每个都占据了路径长度的12.5%。
旋转和移动的混合值设置为100,因此路径的旋转和移动完全应用于受约束的腿骨骼。最后,使用链缩放确保骨骼尽可能靠近路径。
权重
路径back-leg-path的顶点被加权到back-leg-ik1和back-leg-ik2骨骼,在选择路径时可在权重视图中看到。
由于我们使用的是路径,所以没有使用自动来生成权重。相反,我们手动设置每个顶点的权重和顶点手柄。使用了一点权重绘画,我们最终得到了这样的配置:

在移动back-leg-ik-target骨骼时,该路径及约束到该路径的骨骼back-leg1和back-leg8跟随IK骨骼back-leg-ik1和back-leg-ik2。

作为加权过程的最后一步,我们给代表腿的网格顶点分配了权重。该网格被加权到骨骼链back-leg1到back-leg8:

在此步之后移动IK目标,现在也会根据权重变形腿部网格。
路径变形
虽然通过移动IK目标骨骼来移动腿已非常灵活,但是可通过变形路径顶点来增加更多控制。
在动画模式选中sneak动画,我们可以在43、45、47和50帧看到back-leg-path的变形关键帧。这些关键帧使变形人在将腿拉向自己时好似向上弯。
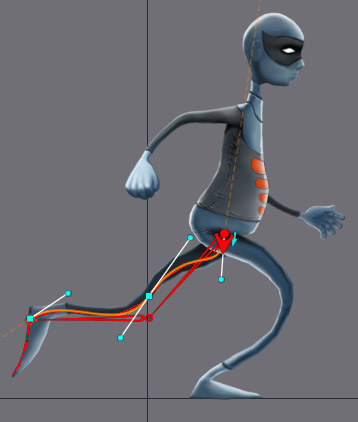
可在此页面上方的播放器中观看sneak动画。